At UBC, APSC 101 (short for applied science) is a project-based first-year course that all engineering students must take, and a continuum of APSC 100. At the start of the class, you get randomly put into a group with 5 other students, who you will do all the projects with. In class, you learn about the engineering design process, and put it into action in monthly projects and studios. From making cardboard chairs for a tribal community, to stimulating a rainfall collection system, we did all sorts of unusual and creative projects.

In the beginning of second semester, our APSC 101 group was given several Arduino kits, and after a simple introduction with 3 tutorials to be self-completed, we were catapulted into this claw-making excursion. I had absolutely no knowledge of servo-motors or breadboards or metal-cutting.
The project goal was divided into 3 rounds. Round 1 was to pick up 5 pieces of varying material bricks, round 2 as many pastas as possible from a large bowl, and round 3 various other objects for a bonus. That meant a very versatile claw that was able to support heavy objects like the metal bricks but could also grab small items like pastas.
In the 5-6 weeks that followed, we went from design-drafts, to cardboard models, to experimenting and building the claws with metal sheets and tools. The last step was to test our claw and create our poster.
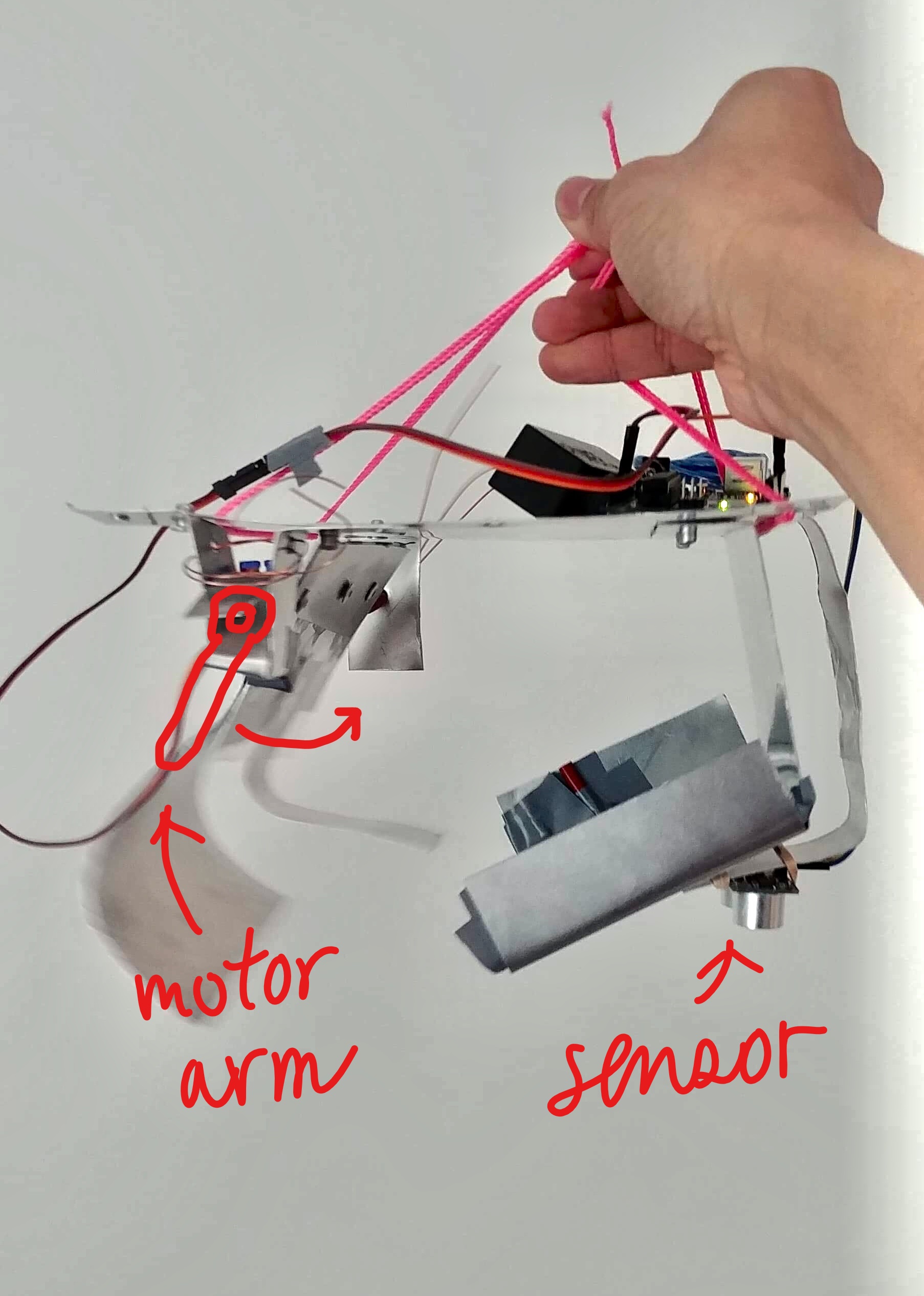
The servo motor, attached to the swinging side of the claw, would rotate in and out, sweeping the objects inside of the claw. At first, the servo arm is in its open position, and the claw is lowered, ready to grab items.

Once the claw was almost at the ground, the sensors attached at the bottom of the claw would detect the distance, and the servo motor would close the claw wing. We also stuck some rubber tubing on the stationary part of the claw to create some friction so that objects would not slide off so easy.
The claw was not perfect, maybe a bit moody and clunky like an old metal monster. Sometimes it would devour the objects, but sometimes, it wasn’t feeling hungry and you couldn’t force it to pick up anything. Still, it seemed to be in a pretty good mood at demonstration day, getting 3 of the heavier metal bricks and some pastas.
It was quite a sizeable feat they assigned to us, and nearly every single group came up with working claws of all kinds of ingenious designs. If you were to tell me at the start of the year that we were going to, make from scratch, a metal claw with electronic parts controlled by an Arduino and C code that picks up objects, I would’ve told you that you were crazy. But there we were, and that’s why I think UBC APSC 101 is so valuable, besides the morning lectures and pointless exams. It pushes us beyond our comfortable realm of knowledge to do things we couldn’t quite so imagine ourselves.
Of course, this project also made me realize later that I did not want to do mechanical engineering. To many swinging parts and unpredictable things.
